Auf dieser Seite befinden sich Zusatz- und Hintergrundinformationen zum xBot:
1. Zum xBot
2. Zusatzmaterial
3. Firmware update und Kalibrierung
4. Möglichkeiten zum Bestellen des xBot
5. Fernsteuerung
5a) Joystick
5b) Fernbedienung
1. Zum xBot
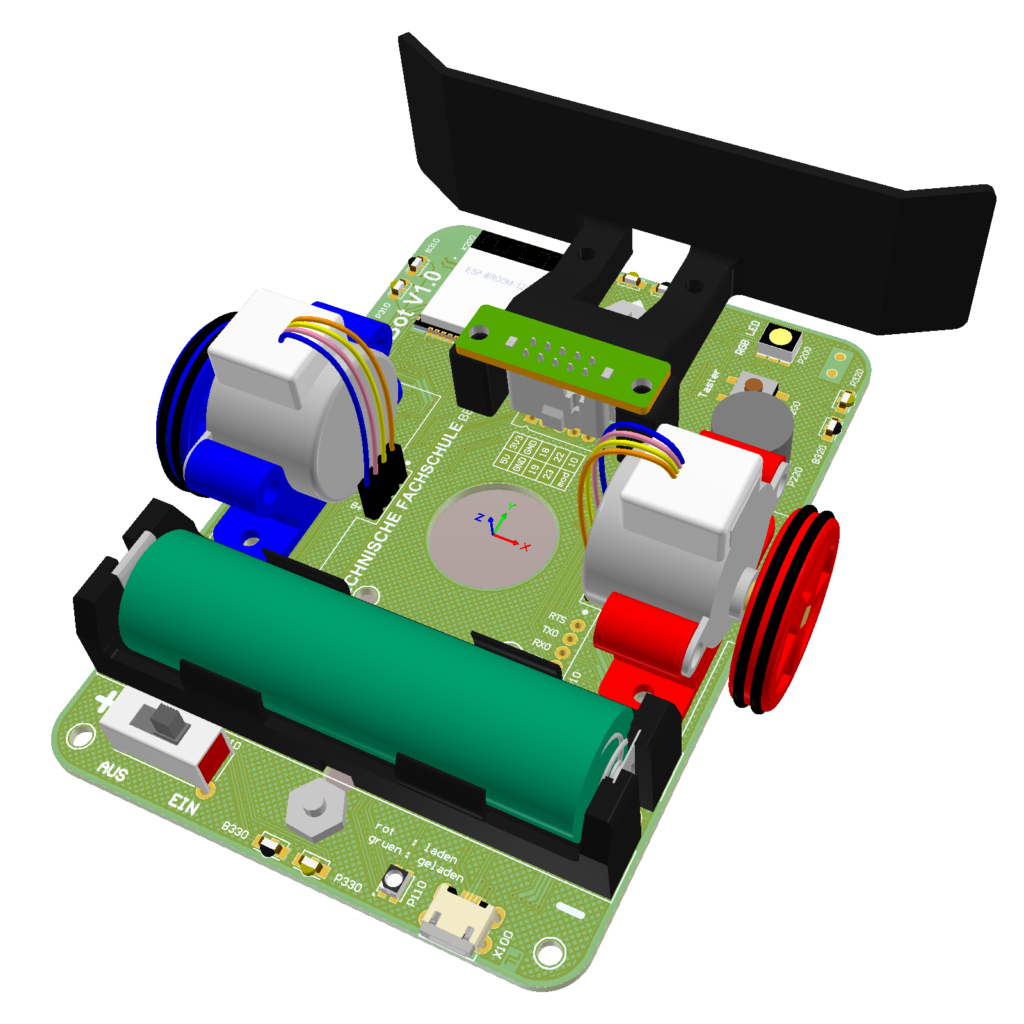
Der xBot V1.0 ist aus einer Kooperation zwischen der > Technischen Fachschule Bern (Herstellung) und des > Ausbildungs- und Beratungszentrums für Informatikunterricht der ETH Zürich entstanden. Das ABZ entwickelte die Anbindung des xBot an die > Programmierumgebung XLogoOnline und ist massgeblich an der Implementierung des Roboters in alle Umgebungen beteiligt gewesen. Konzipiert und realisiert wurde der Roboter im Rahmen einer Masterarbeit Fachdidaktik Medien und Informatik der PH Schwyz im Jahr 2023.
An dieser Stelle einen herzlichen Dank an Thomas Meier der TFBern und Jacqueline Staub (ehemals ETH) für ihre unermüdliche und professionelle Arbeit.
2. Zusatzmaterial
Matte: Der xBot fährt die Distanzen der Umgebung Mini jeweils in Schritten zu 15 cm. Dies entspricht auch gerade einer Einheit eines BeeBots oder eines BlueBots. Somit eignen sich alle > BeeBot – Matten mit quadratischen Feldern. Diese Matten lassen sich aber auch sehr gut durch die SuS selber herstellen.
Papier als Zeichenunterlage: Am besten eignen sich dicke / schwere Papiersorten, da je nach Stift und Fahrgeschwindigkeit / Pause das Papier durchschlagen kann. Zuerst austesten und gegebenenfalls zusätzliche Unterlage verwenden!
Stift: Mit dem Stiftmodul können diverse Stifte eingespannt werden. Das Stiftmodul kann zwei verschiedene Durchmesser abdecken. Wenn die Stellschraube herausgeschraubt wird, lässt sich die Hülse einsetzen / herausnehmen.
Als geeignet haben sich die > edding 3000 permanent marker herausgestellt. Mit der Zusatzhülse (wird mit dem Modul mitgeliefert) ist auch der > edding 400 permanent marker verwendbar. Zu beachten sind bei der Auswahl: Stiftdicke, Filzdicke, Fliessgeschwindigkeit, Wasserlöslichkeit.
Bauklotz: Der Bauklotz hat eine Dimension von 6 x 6 x 6 cm. Dieser kann selber angefertigt werden oder liegt dem Lieferumfang „Schaufelmodul“ bei. Bei dem Material muss folgendes Berücksichtigt werden: Gewicht (bei zu schwerem Bauklotz hat der xBot Mühe mit dem Schieben); Oberfläche (der Bauklotz muss auf der Unterlage einwandfrei rutschen können).
Batterie: Der xBot hat eine wiederaufladbare Lition-Ionenbatterie (# 18650 Protectec) mit 3,6 V | 9.36 Wh und 2600 mAh verbaut. Diese kann ausgewechselt werden, jedoch lässt sie sich auch direkt über den microUSB-Anschluss aufladen.
3. Firmware update und Kalibrierung
Die aktuellste Firmware-Version V14 steht > hier zum Herunterladen zur Verfügung. Die Firmware ist momentan nur für Windows 10 und Windows 11 verfügbar. Wegen fehlendem Entwicklerschlüssel kann es zu Fehlermeldungen seitens des Betriebssystems kommen, diese können ignoriert werden. Das xBot – Tool V1.3 kann ebenfalls heruntergeladen und installiert werden.
Anleitung:
1. Alle > Dateien herunterladen und extrahieren
2. Treiber installieren (xBot/00_Treiber/_alt/CDM21218_Setup.exe)
3. xBot Tool installieren (xBot/01_xBot-Tool/xBot-Tool_V13/setup.exe)
3a) Unter Umständen wird nach einem Microsoft.VisualBasic.PowerPack verlangt. Dieses kann hier heruntergeladen werden: https://go.microsoft.com/fwlink/?LinkID=145727&clcid=0x804
4. xBot Tool öffnen
5. xBot verbinden über USB und einschalten
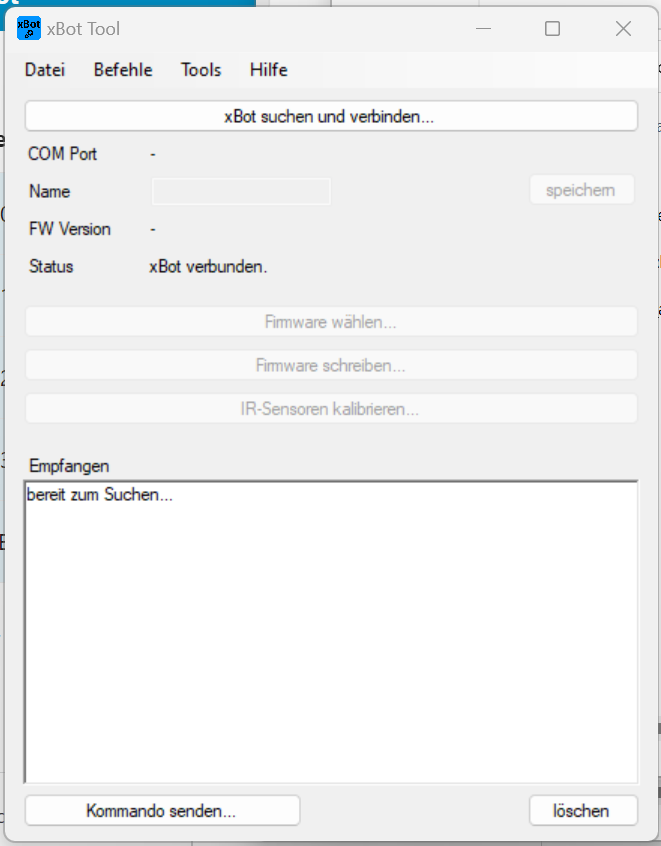
6. „xBot suchen und verbinden“ – Der xBot wird gelistet.
7. „Firmware wählen“ – (xBot/02_xBot_Firmware/xBot_FW_V14.ino.esp32.bin)
8. „Firmware schreiben“ – den xBot aus- und wieder einschalten
9. Nun den xBot ausschalten und wieder einschalten. Er kann neu gesucht werden. Die aktuellste Firmware ist erkennbar.
Alternativ kann nun ein Kommando gesendet werden zum testen. Ebenfalls besteht die Möglichkeit, über „Befehle“ die LED zum leuchten / blinken zu bringen. Ebenfalls kann er umbenennt werden.
Kalibrierung:
1. „IR-Sensoren kalibrieren“ – den xBot aus- und wieder einschalten. Dies kann Sinn machen, wenn in einem neuen Raum mit neuen Lichtverhältnissen gearbeitet wird.
2. Ebenfalls können die Motoren für genaueres Fahren kalibriert werden. Diese Kalibrierung kann ohne PC, nur mit Hilfe eines ausgedruckten Blatt gemacht werden, welches > hier heruntergeladen werden kann. Die Anleitung ist auf dem Blatt vermerkt und ist selbsterklärend.
Was passiert genau bei der Kalibrierung der Motoren?
a) Der Roboter fährt erst die rechte Seite 10x vor und zurück -> LED leuchtet rot
b) Danach 10x das Selbe mit der linken Seite -> LED leuchtet blau
c) Im Anschluss werden noch die Infrarot-Sensoren kalibriert -> LED leuchtet kurz grün
4. xBot und Module kaufen
Der xBot mit allen Modulen wird demnächst bestellbar und ab Frühling 2024 lieferbar sein.
Der xBot wird von der > TF Bern hergestellt. > Thomas Meier ist Verantwortlich für die Produktion.
Fragen, Anregungen und Ideen zur Weiterentwicklung der Lerneinheit wie auch zum Arbeiten mit dem xBot nimmt > Urs Wildeisen entgegen.
5. Fernsteuerung
Zum xBot gibt es einen Joystick und eine Fernbedienung, welche beide im Browser laufen und somit Geräte- und Plattformunabhängig sind.
5a) Joystick
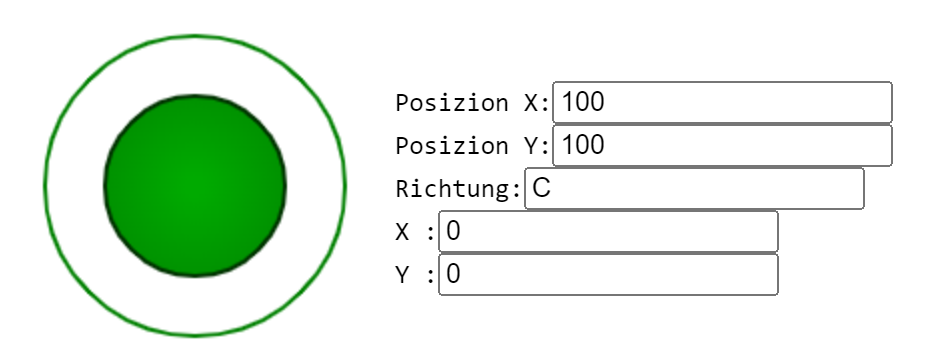
Mit dem Joystick kann der xBot in alle Richtungen gesteuert werden. Die Steuerung erfolgt über eine Zweiweg – Steuerung, welche beide Motoren des Roboters anspricht.
5b) Fernbedienung

Mit der Fernbedienung kann der xBot in alle Richtungen gesteuert werden. Die Steuerung erfolgt über eine Hebelsteuerung, welche jeweils den linken respektive den rechten Motor des Roboters anspricht.