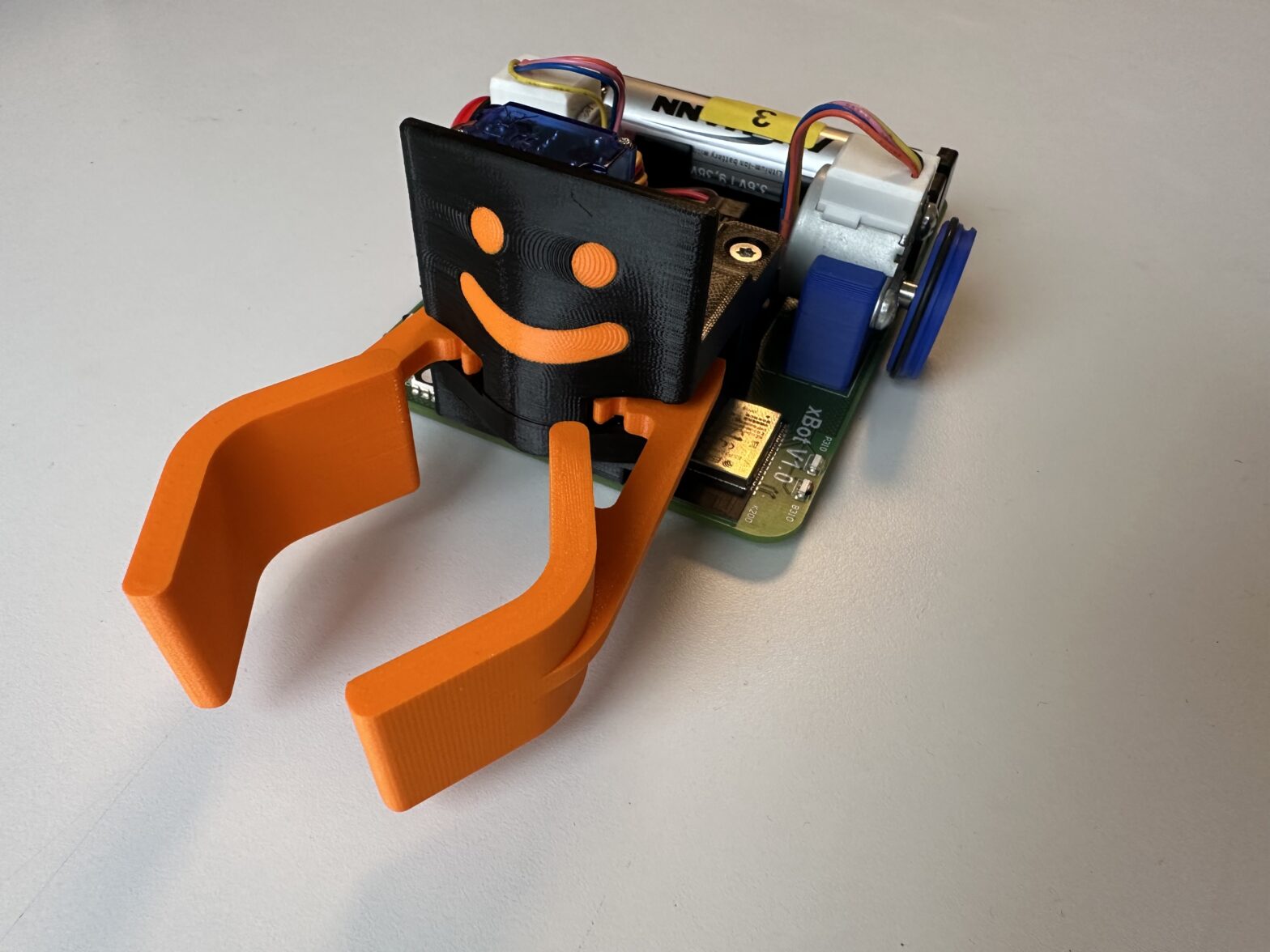
Allgemein: Mit dem Greifer-Modul lassen sich Gegenstände packen und in alle Richtungen verschieben. Bei der Anwendung müssen die Schüler*innen Abstände und Grössen einschätzen lernen, um sie richtig zu greifen und zu verschieben. Diese Anleitung richtet sich an das Bedienen und Programmieren des xBot mit dem Greifermodul (Teil 1, Zielstufe Zyklus 2) und das selber herstellen von Greifarmen mit 3D – gedruckten Teilen (Teil 2, Zyklus 3).
Teil 1: Bedienung und Programmieren des Greifer – Moduls Z2
Beschreibung: Die Schüler*innen sollten Grundkenntnisse im blockbasierten Programmieren mitbringen. Entweder kann dies in xLogo (Umgebung Maxi) sein oder direkt in der Software des Root iRobot.

Material: xBot, Greifer-Modul, webbasierte Programmierumgebung iRobot, Gegenstände zum Greifen
Vorgehen: Für das Ansteuern des xBot Greifer ist die kostenlose, webbasierte Programmierumgebung iRobot zu verwenden, da diese den Befehl „say“ hat. Mit diesem Befehl kann der Greifarm angesteuert werden. Alle restlichen Grundbefehle sind die selben wie in xLogo. Die Umgebung ist – ähnlich wie Scratch – basierend auf Textblöcken. Diese sind (Stand 2024) nur auf Englisch vorhanden.
Ist die Programmierumgebung gestartet, können die Greifer mit dem Befehlsblock «say» angesteuert werden. Dabei können die Greifer entweder ganz geöffnet («Auf») oder ganz geschlossen werden («Zu»). Zusätzlich können verschiedene Schliessgrade eingestellt werden (C0-C9) dabei entspricht C0 «Zu» und C5 «Auf».

So kann der Roboter mit diversen anderen Befehlen in Bewegung gebracht werden und die Greifer können als Zwischenelement verschiedene Gegenstände transportieren.
Verwendete Befehle: Diese Befehle werden in der webbasierte Programmierumgebung iRobot verwendet: Grundbefehle, Wiederholungen («when program started»), Greifer öffnen («say Auf»), Greifer schliessen («say Zu»), Greifer genauer ansteuern («say C0-C9»)
Verwendete Begriffe: Servo, Grad, Wiederholungen, Befehl, textbasiert, textblockbasiertes Programmieren
Teil 2: Herstellen von Greifarmen mit 3D – gedruckten Teilen Z3
Beschreibung: Der xBot bietet mit seinen verschiedenen Modulen bereits einige Möglichkeiten zur Anwendung. Im Zyklus 3 können Lernende zusätzliche eigene Bauteile entwickeln, welche am xBot angewendet werden können. Bei einem solchen Projekt stehen besonders das Konstruieren und der 3D-Druck im Vordergrund. Um die Bauteile dann anwenden zu können sind auch handwerkliche Aspekte sowie das Programmieren zentral.
Die Schüler*innen sollten viel Kreativität, Geduld sowie Lernbereitschaft mitbringen. Einige Grundkenntnisse im blockbasierten Programmieren sind ebenfalls wichtig.

Material: xBot, CAD-Programm (z.B. Tinkercad: https://www.tinkercad.com/, Autodesk Inventor), 3D-Druck, Programmierumgebung iRobot (webbasiert: https://code.irobot.com/#/), sonstige Materialien (Schrauben, Unterlagscheiben, Muttern, Servos, …)
Vorgehen: Die Schüler*innen erarbeiten eine Idee, welche sie mit dem Roboter umsetzen möchten. Anschliessend erstellen sie Skizzen von Hand und erste Konstruktionen aus Karton. Dabei beachten sie besonders die verschiedenen Abmessungen, welche ihnen auf einem Plan des xBots zur Verfügung gestellt werden können. Danach konstruieren die Lernenden ihre Ideen in einem CAD-Programm. Nach der Fertigstellung können erste Prototypen als 3D-Druck gedruckt und auf den Roboter montiert werden. Dabei sind möglicherweise noch zusätzliche Materialien notwendig, welche vorgängig eingeplant werden müssen. Möglich wäre danach, eine Platine anzuschliessen und das neue Bauteil zum Funktionieren zu bringen, indem man mit der Programmierumgebung arbeitet.

Material: xBot, CAD-Programm (z.B. Tinkercad: https://www.tinkercad.com/, Autodesk Inventor), 3D-Druck, Programmierumgebung iRobot (webbasiert: https://code.irobot.com/#/), sonstige Materialien (Schrauben, Unterlagscheiben, Muttern, Servos, …)
Vorgehen: Die Schüler*innen erarbeiten eine Idee, welche sie mit dem Roboter umsetzen möchten. Anschliessend erstellen sie Skizzen von Hand und erste Konstruktionen aus Karton. Dabei beachten sie besonders die verschiedenen Abmessungen, welche ihnen auf einem Plan des xBots zur Verfügung gestellt werden können. Danach konstruieren die Lernenden ihre Ideen in einem CAD-Programm. Nach der Fertigstellung können erste Prototypen als 3D-Druck gedruckt und auf den Roboter montiert werden. Dabei sind möglicherweise noch zusätzliche Materialien notwendig, welche vorgängig eingeplant werden müssen. Möglich wäre danach, eine Platine anzuschliessen und das neue Bauteil zum Funktionieren zu bringen, indem man mit der Programmierumgebung arbeitet.


Verwendete Befehle: Die Befehle können sehr individuell sein. Es macht Sinn, im iRobot mit dem Befehlsblock «say» zu arbeiten, um individuelle Befehle programmieren zu können.
Verwendete Begriffe: Prototyp, CAD, Konstruieren, 3D-Druck, Filament, Befehl, Programmieren, Servo

Lizenz: CC-BY Sara Rentsch