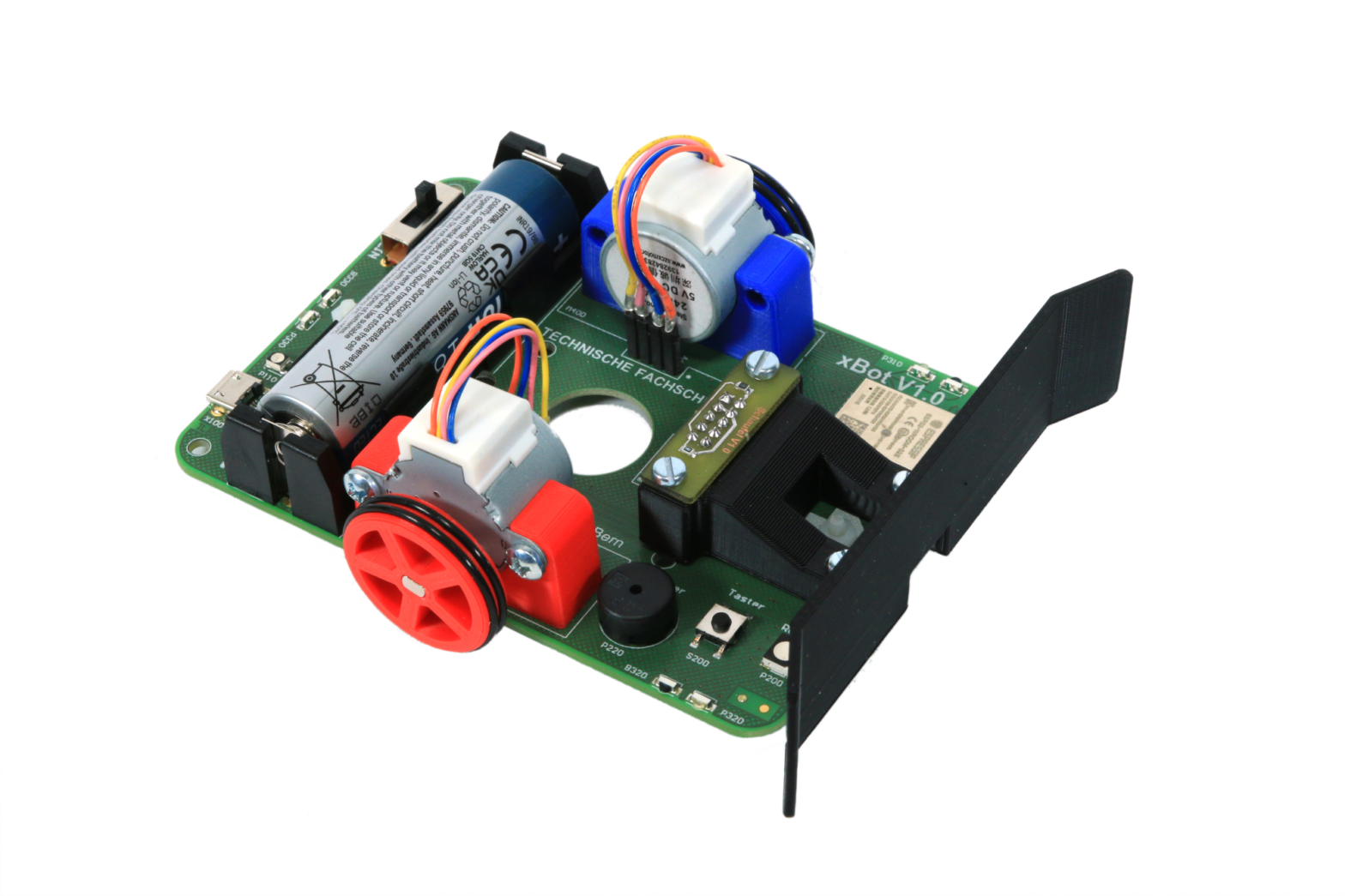
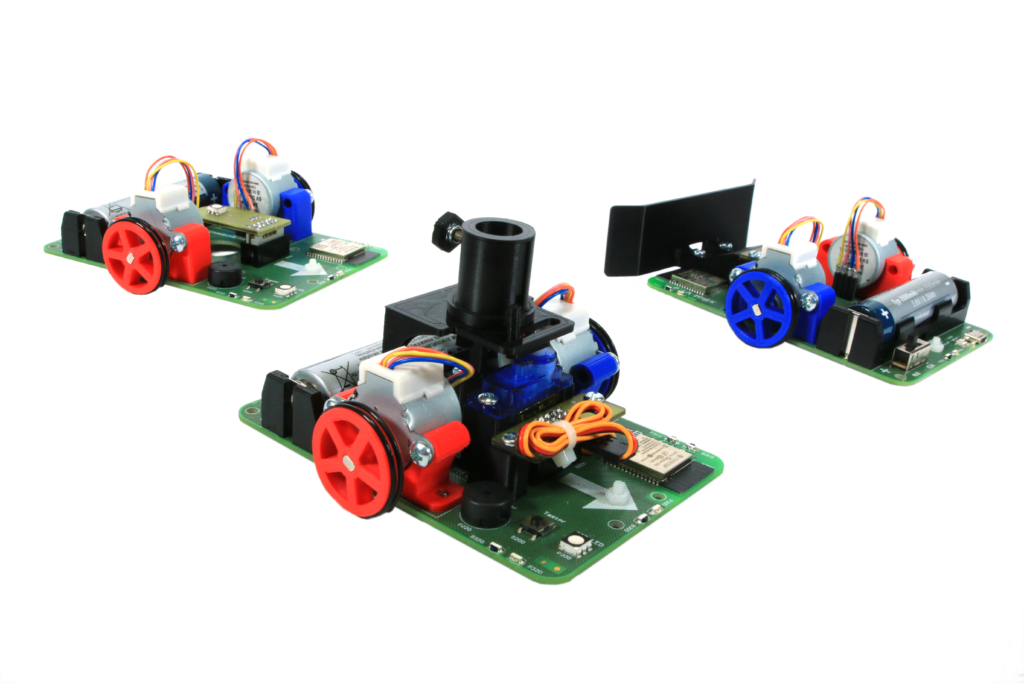
Mit dem Schaufelmodul lassen sich Gegenstände wie beispielsweise den Bauklotz herumschieben. Als Einführung in die Arbeit mit dem xBot ist er geeignet, da er sich über die Distanzsensoren (IR – Sensoren) mit der Hand bewegen und drehen lässt. So lassen sich Objekte verschieben. Am geeignetsten ist das Arbeiten auf einer BeeBot – Matte mit einer Feldgrösse von 15 x 15 cm.
Normalbetrieb mit Zusatzfunktionen: Steuerung ohne Programmierumgebung
Der Hebel des On/Off – Schalter muss eingeschalten werden (gegen die Mitte stossen). Die RGB-LED vor dem roten Rad blinkt blau. Tasterfunktion: Beim Drücken leuchtet die RGB-LED grün, die Sonderfunktion ist aktiv. Erneutes Drücken deaktiviert die Sonderfunktionen.
Folgende Sonderfunktionen besitzt nun der xBot ohne Programmierung:
– Er reagiert auf die Näherungssensoren (IR – Sensoren).
– Hinten: fährt 20.5 cm nach vorne und danach 5.5 cm zurück (dies ermöglicht das Schieben eines Klotzes in die Mitte des nächsten Feldes der Matte).
– Vorne: fährt 15 cm rückwarte
– Links: dreht 90° gegen rechts
– Hinten: Rechts: dreht 90° gegen links
Steuerung mit der Programmierumgebung:
> Programmierumgebung XLogoOnline
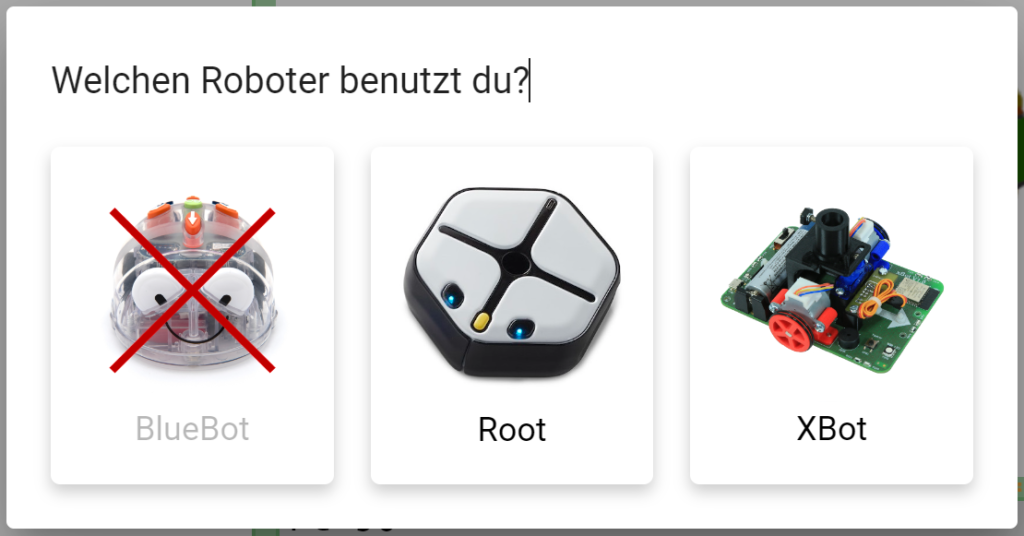
Die RGB-LED vor dem roten Rad blinkt blau: der xBot bereit zum koppeln. Wird der xBot über xLogo verbunden, erlöscht die RGB-LED und der xBot ist gekoppelt. Das Verbinden geschieht in der Programmierumgebung – Menü – Roboter. Kann ein Roboter nicht ausgewählt werden, so liegt dies daran, dass mit dieser Programmierumgebung der Roboter nicht angesteuert werden kann (Bild 1).
Folgende Funktionen hat der xBot in den jeweiligen Menüs:
xLogo Mini (Zyklus 1):

- Vorwärts (fd): 15 cm fahren (entspricht einem Feld auf der Matte)
- Rückwärts (bk): 15 cm fahren (entspricht einem Feld auf der Matte)
- Links (lt): blau, stimmt mit der Schildkröte und dem xBot überein. 90 Grad drehen an Ort gegen links
- Rechts (rt): rot (= red), stimmt mit der Schildkröte und dem xBot überein. 90 Grad drehen an Ort gegen rechts.
xLogo Midi (3. / 4. Klasse):

- Vorwärts (fd): 1 Pixel entspricht 1 mm. Beispiel: fd 100 = 10 cm fahren
- Rückwärts (bk): 1 Pixel entspricht 1 mm. Beispiel: fd 100 = 10 cm fahren
- Links (lt): blau, stimmt mit der Schildkröte und dem xBot überein. lt 90 = 90 Grad drehen an Ort gegen links
- Rechts (rt): rot (= red), stimmt mit der Schildkröte und dem xBot überein. rt 90 = 90 Grad drehen an Ort gegen rechts.
xLogo Maxi (5. / 6. Klasse):
- Vorwärts (fd): 1 Pixel entspricht 1 mm. Beispiel: fd 100 = 10 cm fahren
- Rückwärts (bk): 1 Pixel entspricht 1 mm. Beispiel: fd 100 = 10 cm fahren
- Links (lt): blau, stimmt mit der Schildkröte und dem xBot überein. lt 90 = 90 Grad drehen an Ort gegen links
- Rechts (rt): rot (= red), stimmt mit der Schildkröte und dem xBot überein. rt 90 = 90 Grad drehen an Ort gegen rechts.

Autor: Urs Wildeisen (CC BY-SA)